The Map Shows Mines and Explosives in 2010.

but also injure or kill more than 2000 people every month.

due to the lack of manpower and the manual methods used.

the equipment is very expensive, large, heavy and has difficulty reaching mined areas.
to prototype a cheap, portable and easy to use mine detection and marking system.
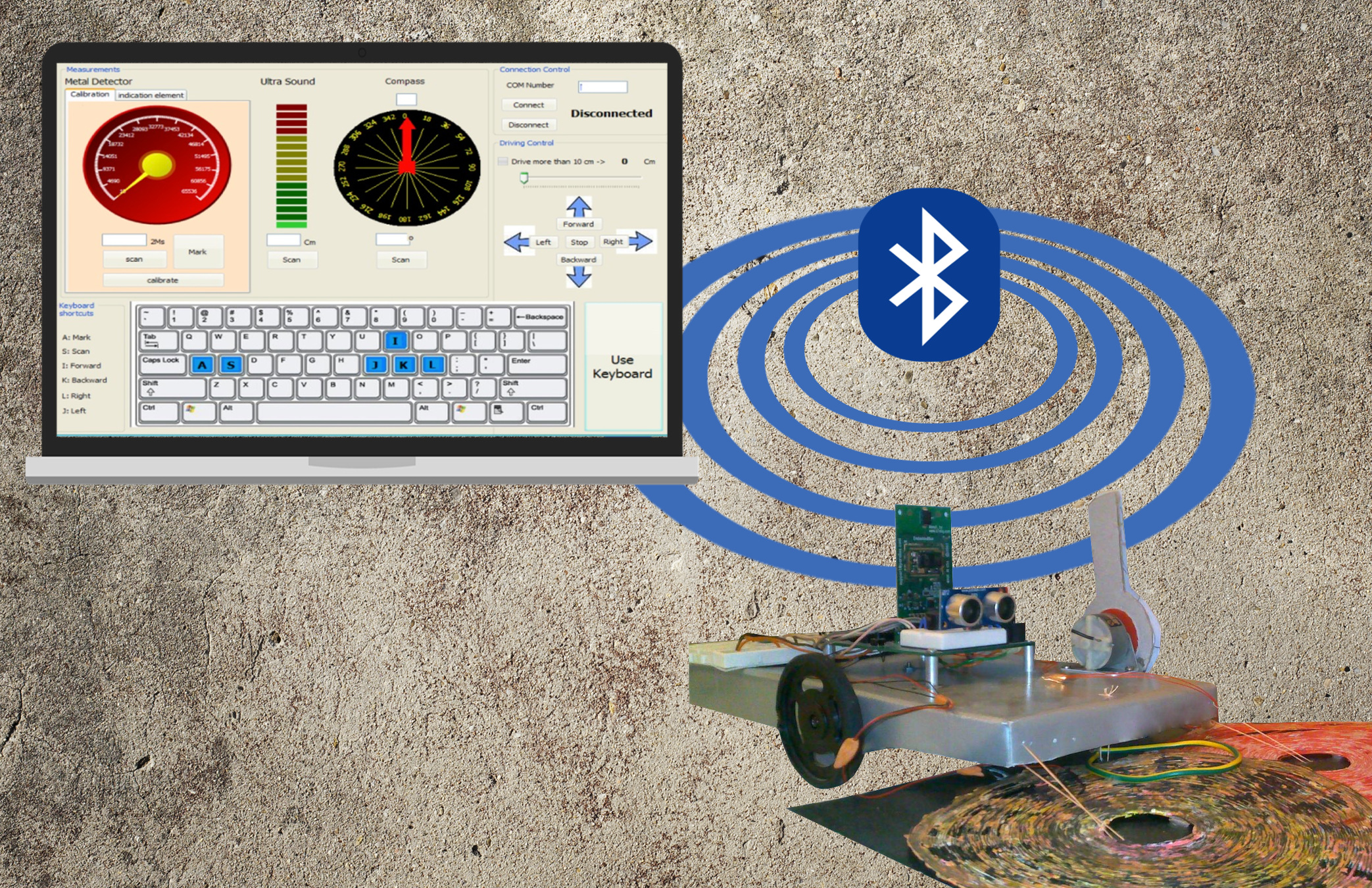
For this Project, I built a mine detection robot with a landmine marking system that is controlled using a remote laptop or a handheld device. This system dramatically improves the process of clearing landmines and introduces a very shallow learning curve to landmine detection teams.
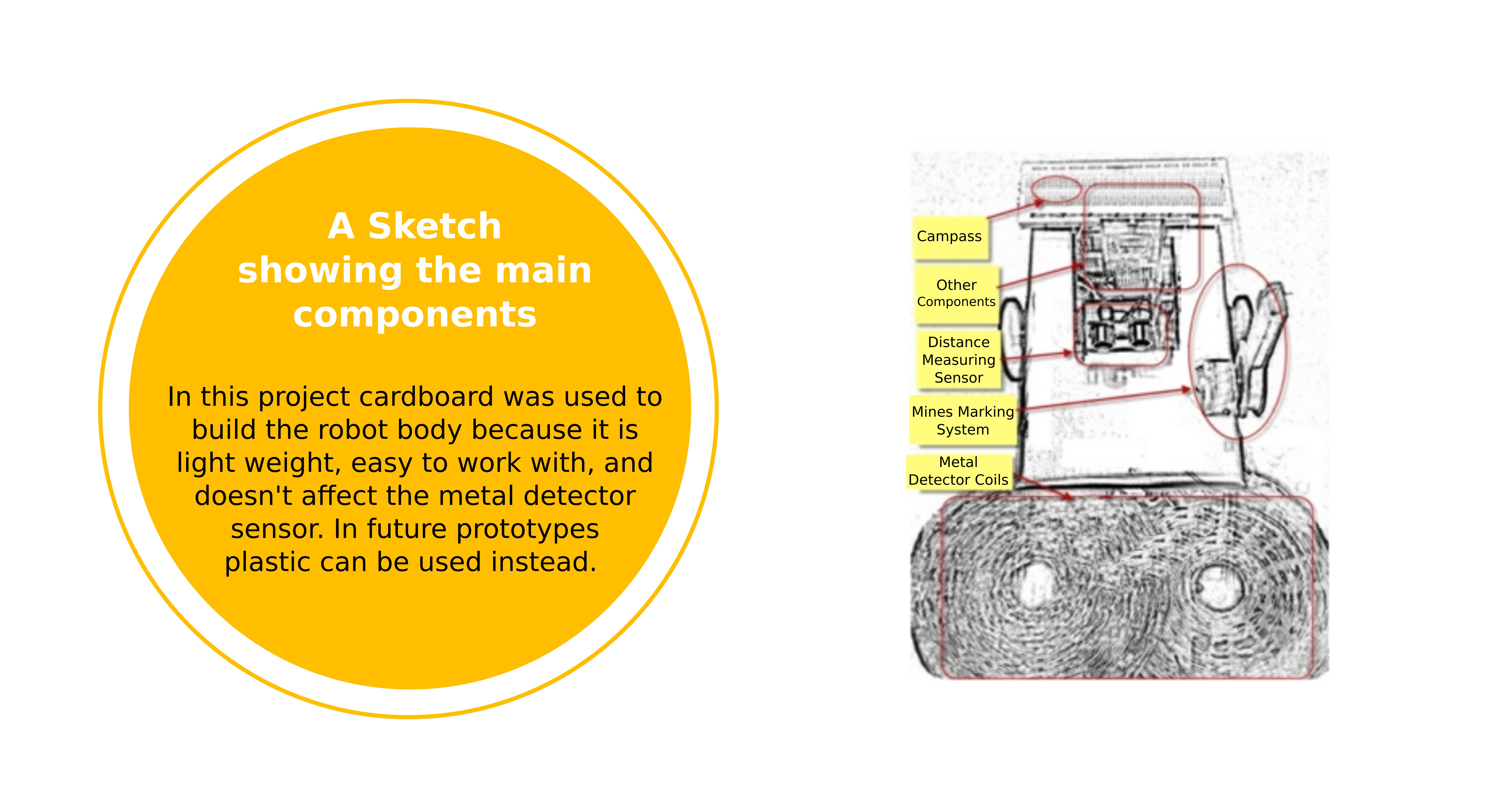
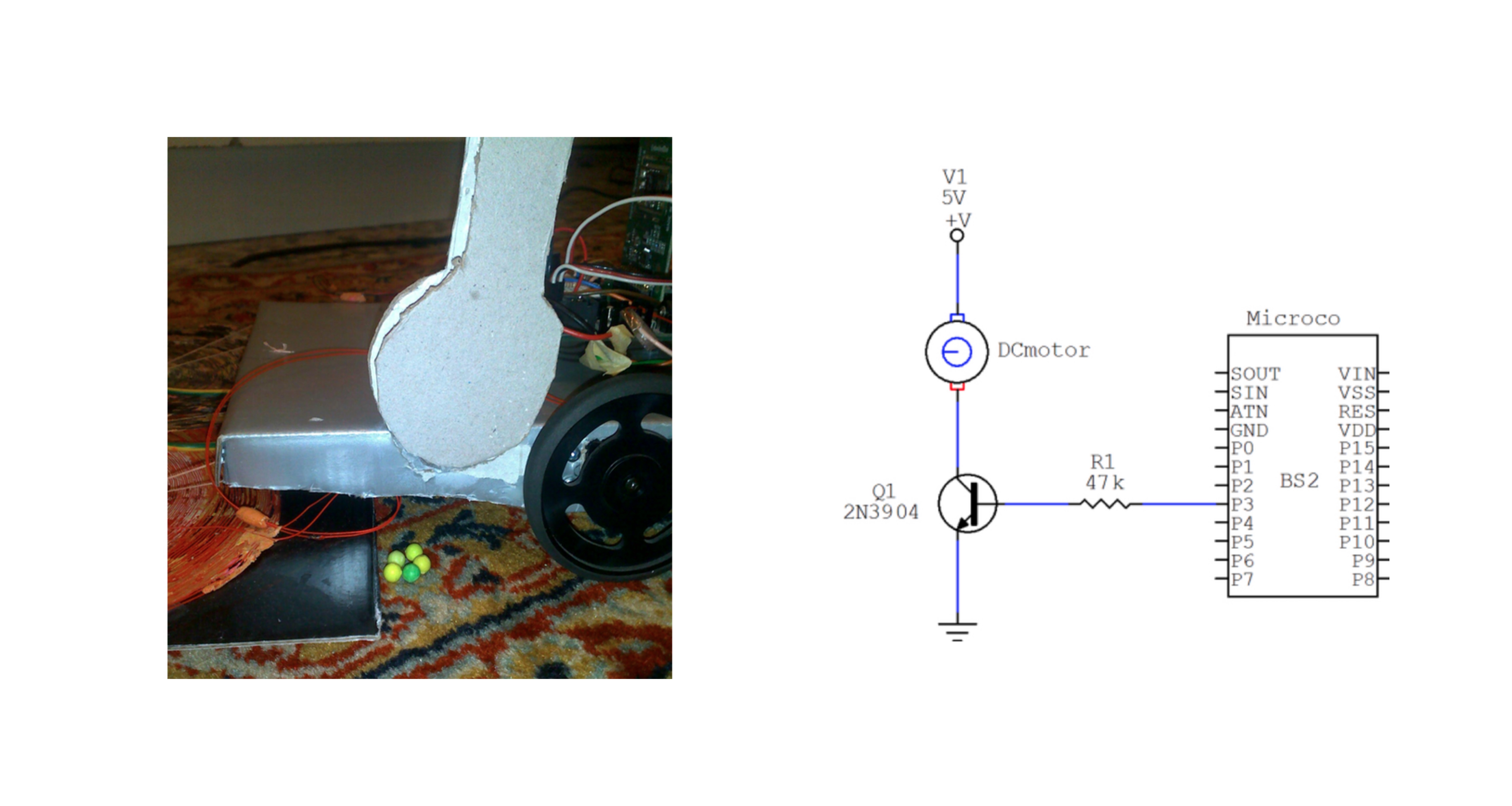
The main issue in designing the robot body is to make it weigh less than 3kg so that mines won't explode when the robot is moving above them.
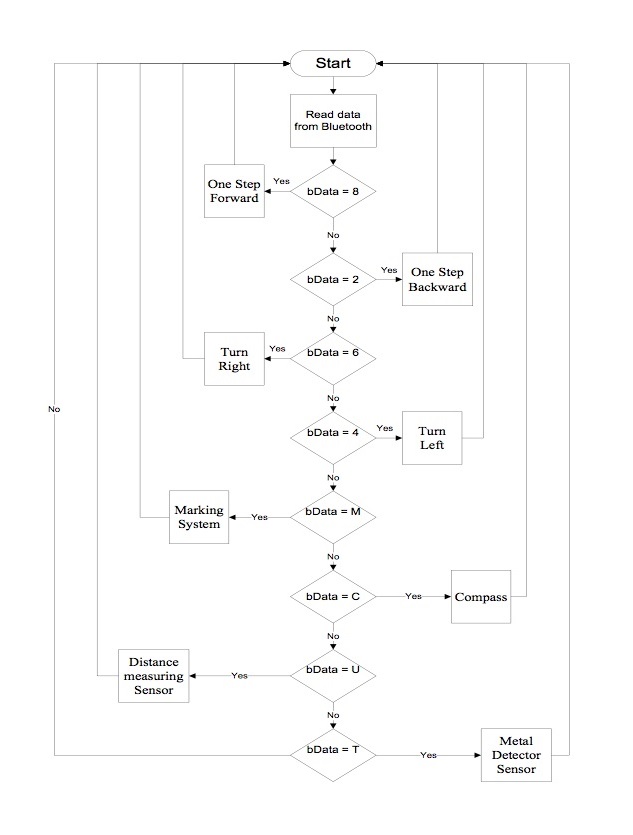
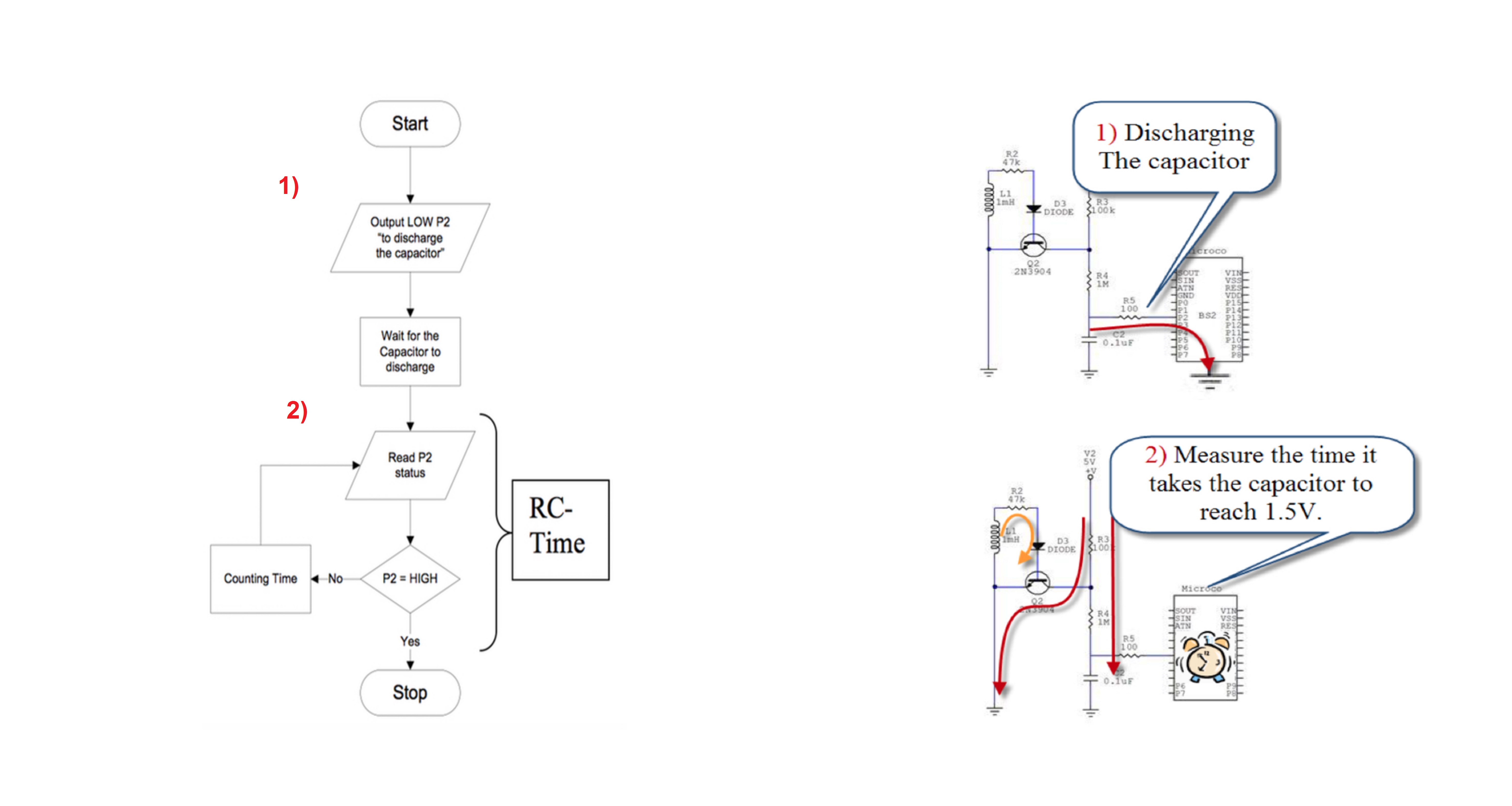
In this project two pieces of software were developed. One is installed on the robot’s microcontroller, which controls the robot based on the commands sent by users, and the other is installed on users’ computers or pocket pcs which allows them to remote control the robot and read the measured data. The flowchart shown summarizes how these two pieces of software communicate with each other.
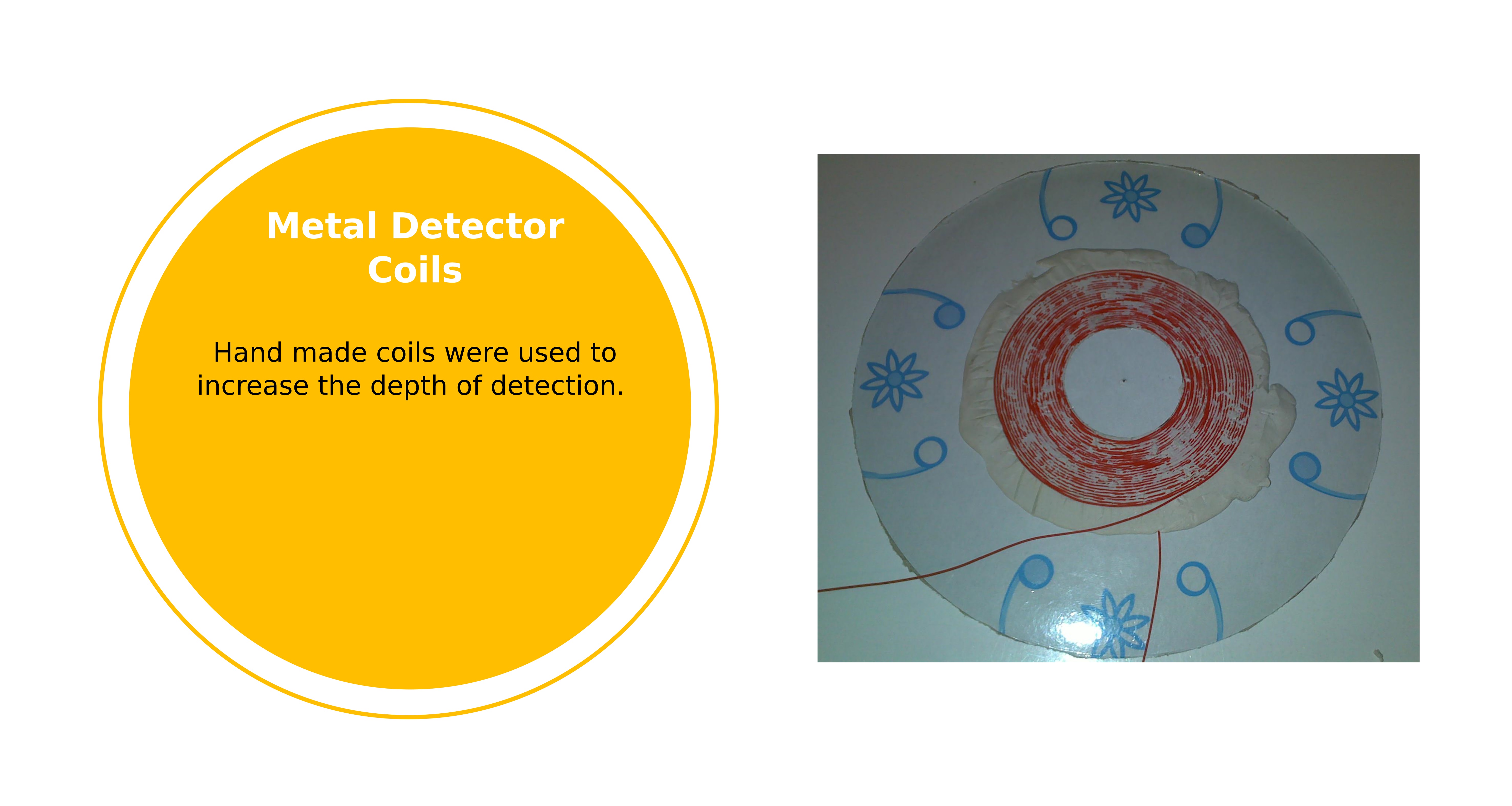
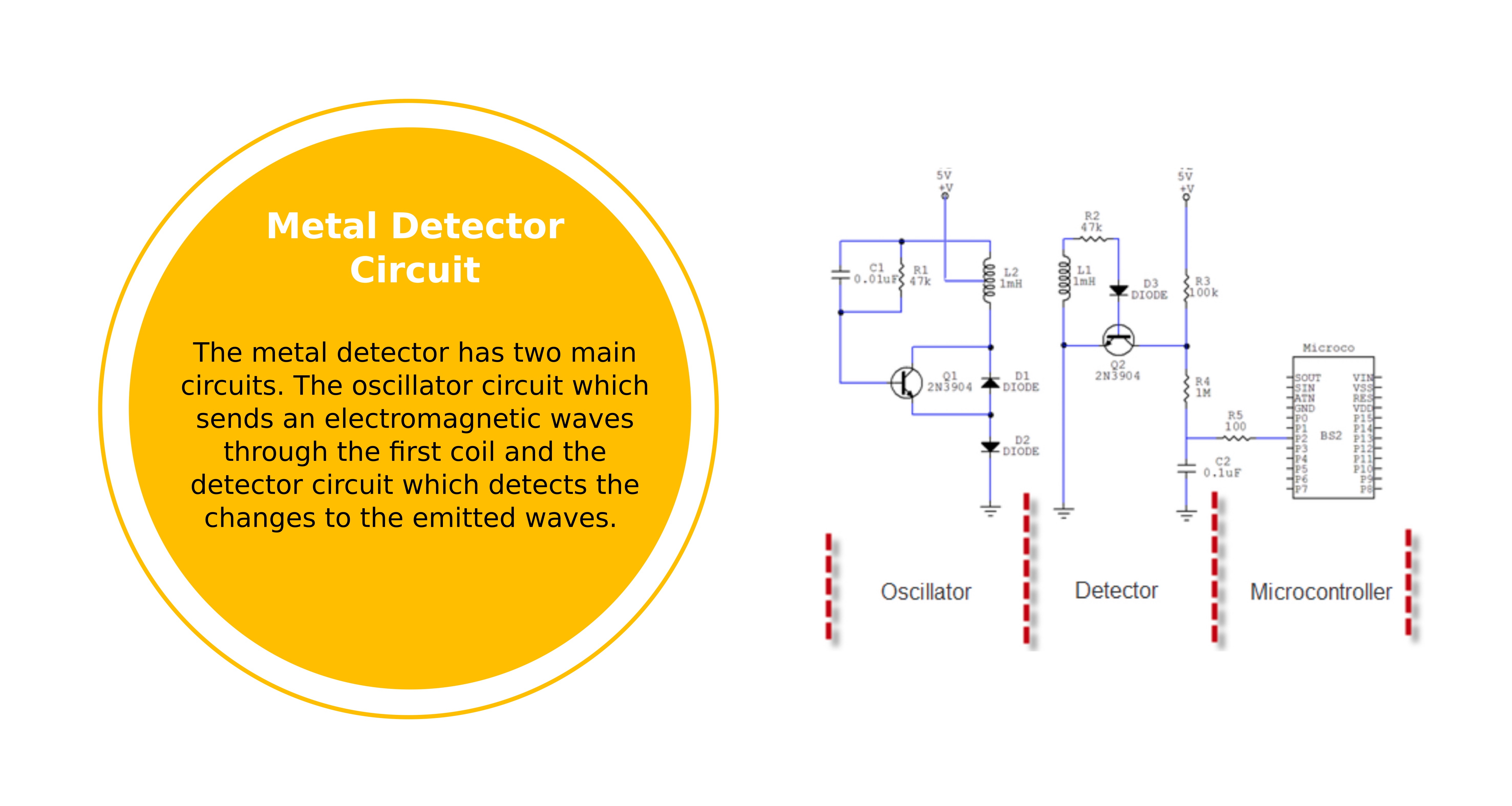
Two hand made coils are used in this metal detector. The first coil is connected to the oscillator circuit, which sends continuous electromagnetic waves. The second coil picks the generated waves and the microcontroller sense the changes in these waves through the detector circuit.
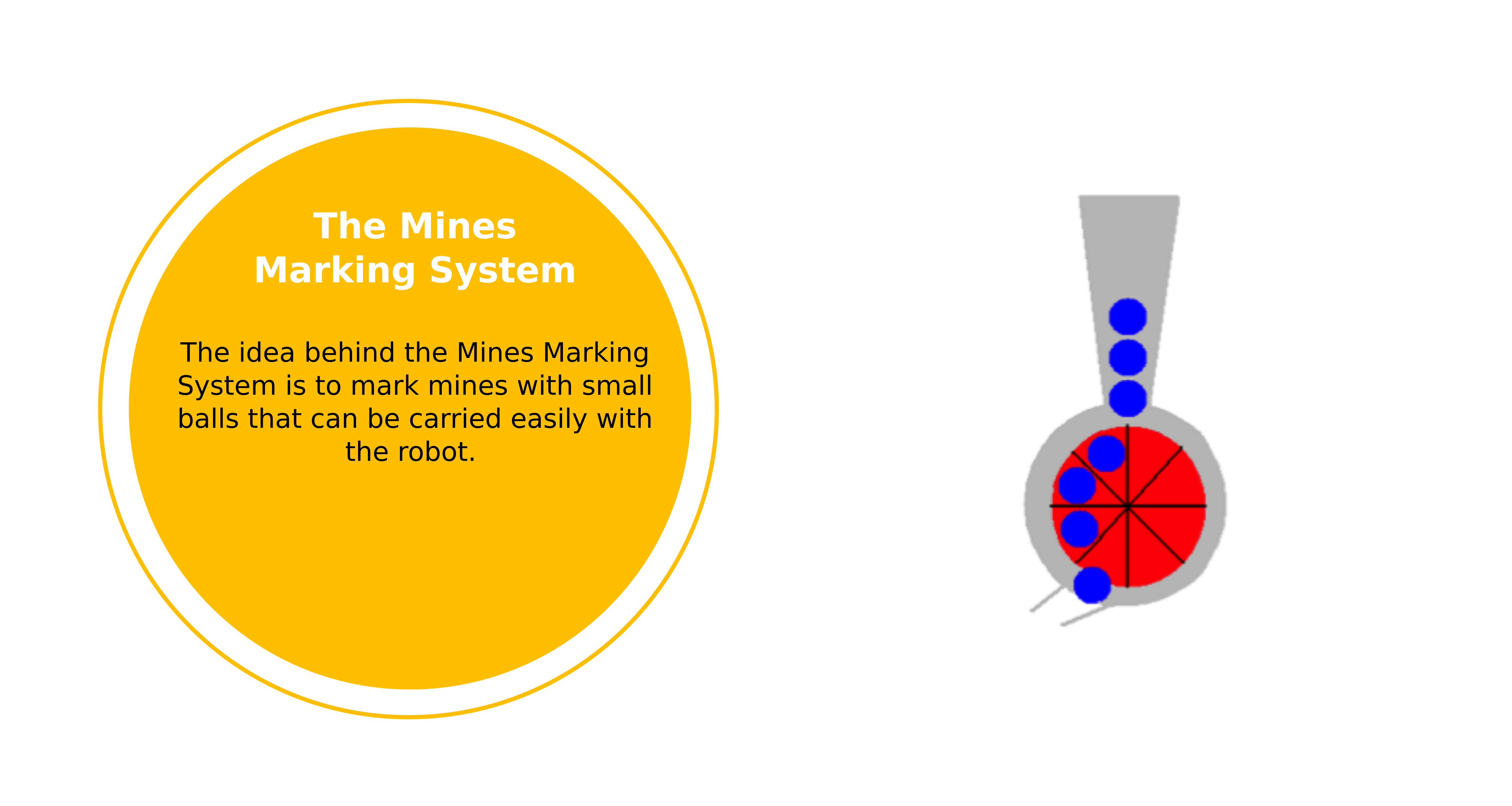
A small DC motor releases small balls to mark the detected mines. This motor is controlled by the microcontroller.
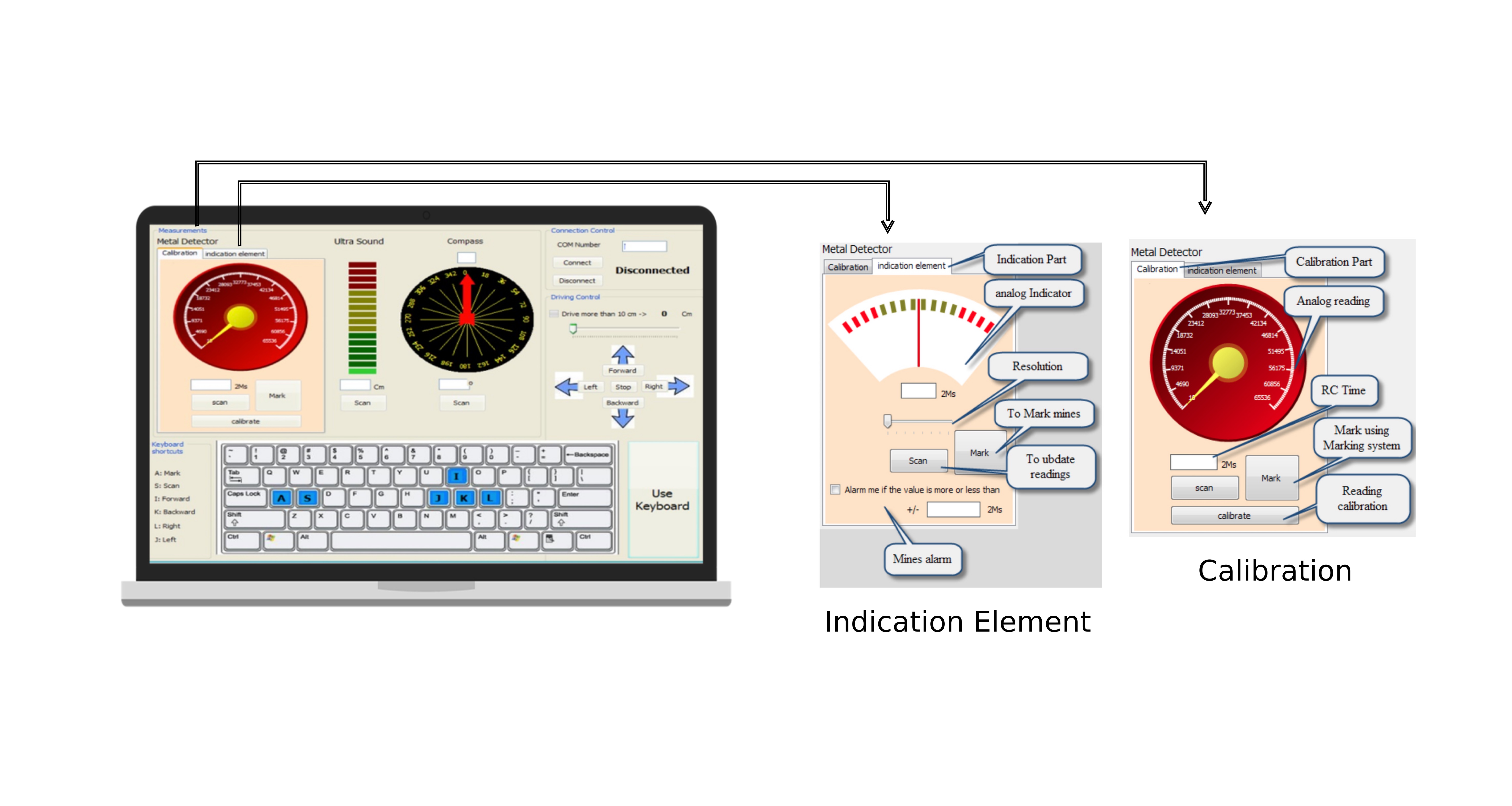
The Metal Detector section of the interface is used to detect mines. This section is divided into two taps; the calibration and the indication tap. The calibration tap displays the RC time that is being measured and is used to calibrate the metal detector. The calibration process is important to overcome the ground effect phenomena.
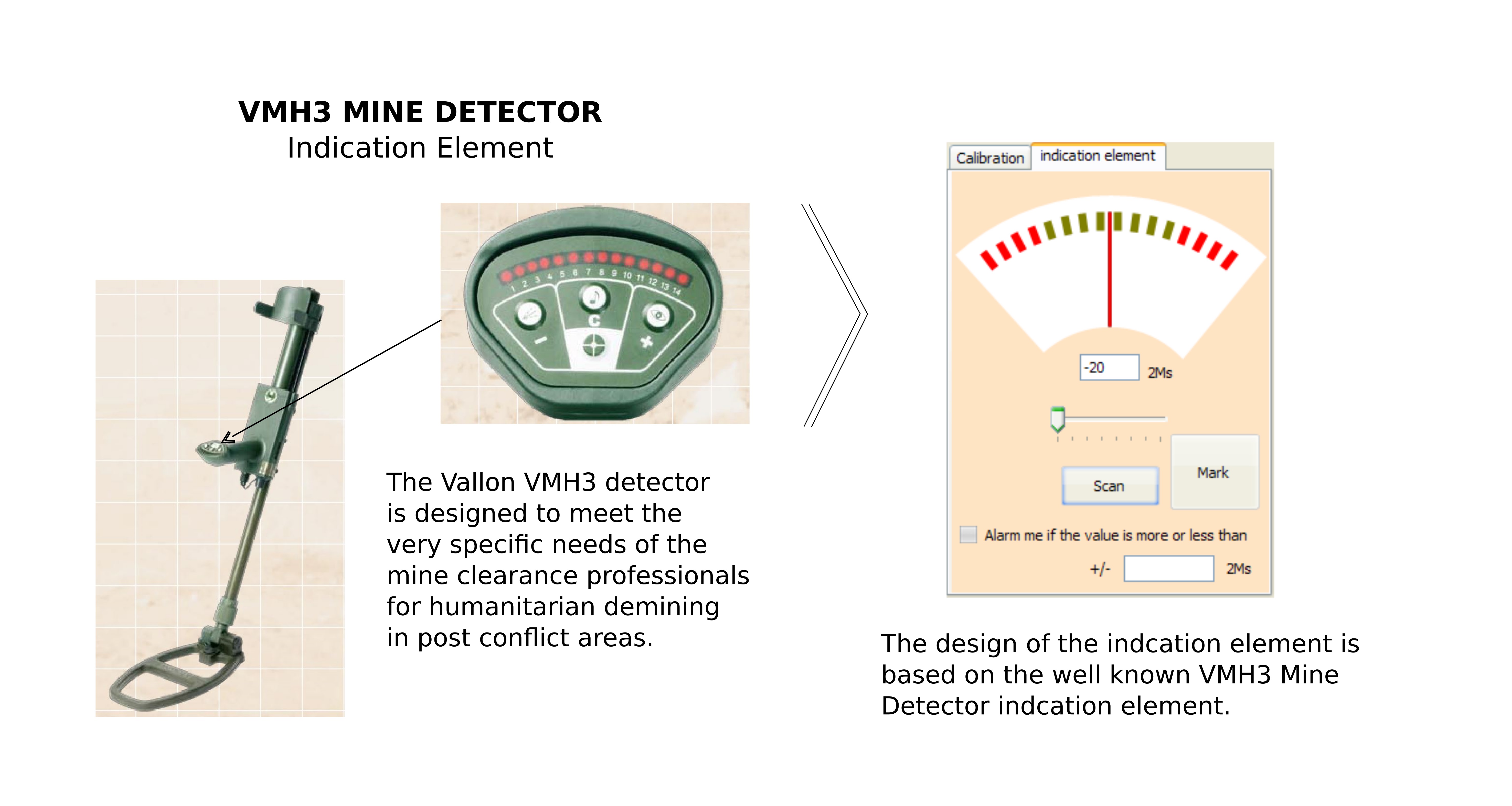
The indication tap is designed based on the popular VNH3 mine detector indication element. the resolution of the system can be adjusted using the track bar. An alarm can be set to alarm users when the reading changes by a pre set value.
Users can use the mark button to mark any suspicious places utilizing the Mines Marking System.